|
Опишем стохастическую модель регуляции, предложенную в статьях [12] и [13]. Как и прежде, имеем:   профиль экспрессии регулируемого гена, где профиль экспрессии регулируемого гена, где
 профиль j-того ген-регулятора профиль j-того ген-регулятора
 . .
Для удобства будем далее обозначать  . .
Регуляция гена-мишени описывается следующим уравнением:
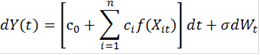
где:
 - регуляторная функция. - регуляторная функция.
 - дисперсия случайной ошибки. - дисперсия случайной ошибки.
 - константа, включающая в себя уровень деградации и фоновую экспрессию. - константа, включающая в себя уровень деградации и фоновую экспрессию.
 вклад i-того регулятора. вклад i-того регулятора.
 - винеровский процесс. Т.е: - винеровский процесс. Т.е:
1. 
2.  независимы в совокупности. независимы в совокупности.
. 
Такой процесс описывает броуновское движение, или в данном случае - случайную ошибку эксперимента. 
В качестве регуляторной функции предлагается выбрать сигма-функцию.
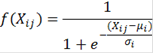
где:


Пусть набор регуляторов и целевой ген фиксированы, и их профили экспрессий известны. Требуется по этой информации найти вектор  и . Для достаточно малых и . Для достаточно малых  имеем аппроксимацию: имеем аппроксимацию:
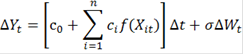

Где 
Обозначив





Имеем в матричной записи:

Здесь нам известны  и и  , причем , причем  - стандартный гауссовский вектор. - стандартный гауссовский вектор.
|
 На каком основании людей избирают лидерами, либо позволяют им становиться таковыми? Для объяснения этого явления был разработан ряд теорий, однако последние исследования сосредоточены на так называемых имплицитных теориях лидерства.
На каком основании людей избирают лидерами, либо позволяют им становиться таковыми? Для объяснения этого явления был разработан ряд теорий, однако последние исследования сосредоточены на так называемых имплицитных теориях лидерства. Для успешной работы фирмы на рынке необходимо не только определиться с целями, но и понять, как их можно достичь. Для этого надо очень хорошо изучить своего потребителя, а может, даже и создать новый тип потребителя.
Для успешной работы фирмы на рынке необходимо не только определиться с целями, но и понять, как их можно достичь. Для этого надо очень хорошо изучить своего потребителя, а может, даже и создать новый тип потребителя. Прежде всего менеджеру необходимо определить какой вид карьеры он предпочитает. Это и определит его стратегию. Если он менеджер знает, какое положение хочет занять через пять или даже десять лет, то можно определить направление действий и составить задачи, которых необходимо достичь.
Прежде всего менеджеру необходимо определить какой вид карьеры он предпочитает. Это и определит его стратегию. Если он менеджер знает, какое положение хочет занять через пять или даже десять лет, то можно определить направление действий и составить задачи, которых необходимо достичь.